Arduino gestuurde stappenmotor/macrorail


Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Bedankt voor jullie reacties. Maar het 'ding' is nog niet af...
De afdekkap voor de motorunit moet ik nog passend maken en dan uiteindelijk dichtmaken. En ik zit nog te wachten op dat ene 2,5mm stereo chassisdeeltje van nog geen 2 euro...
Dan kan 'ie helemaal in bedrijf en kunnen de focus stack experimenten beginnen.
De afdekkap voor de motorunit moet ik nog passend maken en dan uiteindelijk dichtmaken. En ik zit nog te wachten op dat ene 2,5mm stereo chassisdeeltje van nog geen 2 euro...
Dan kan 'ie helemaal in bedrijf en kunnen de focus stack experimenten beginnen.
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Afdekkap passend gemaakt en voor een fotootje ff er op geschroefd:
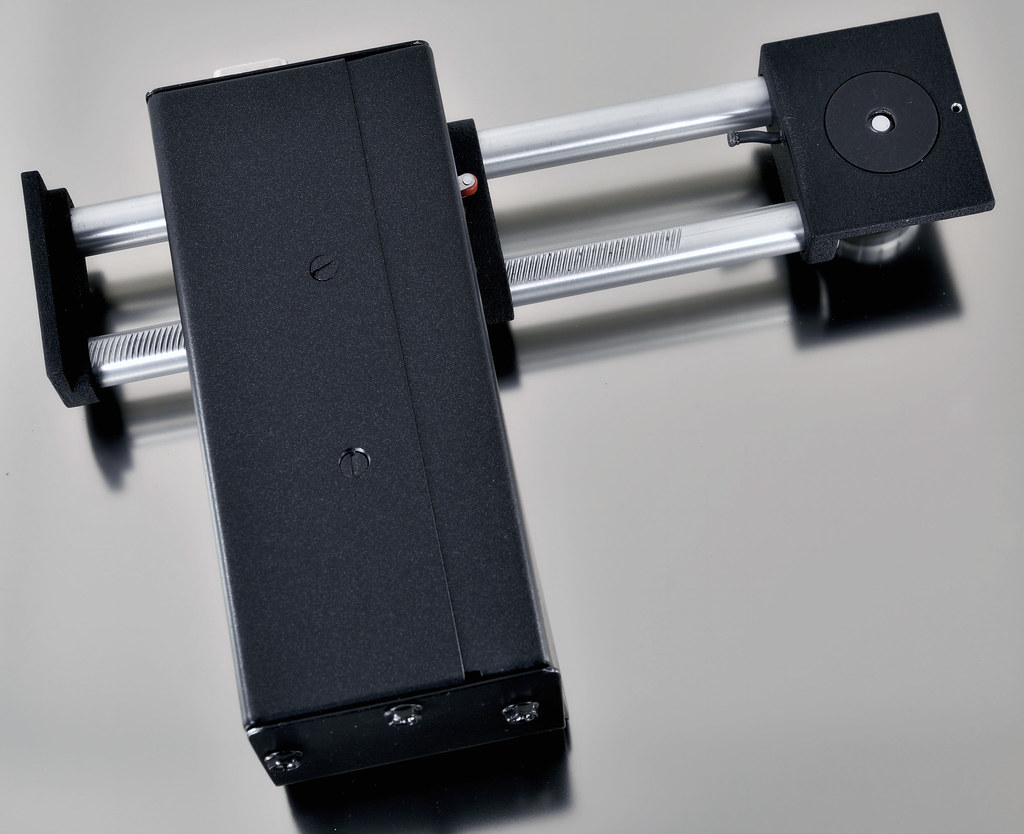
MacroRailProjRail07 by Erik Haak, on Flickr
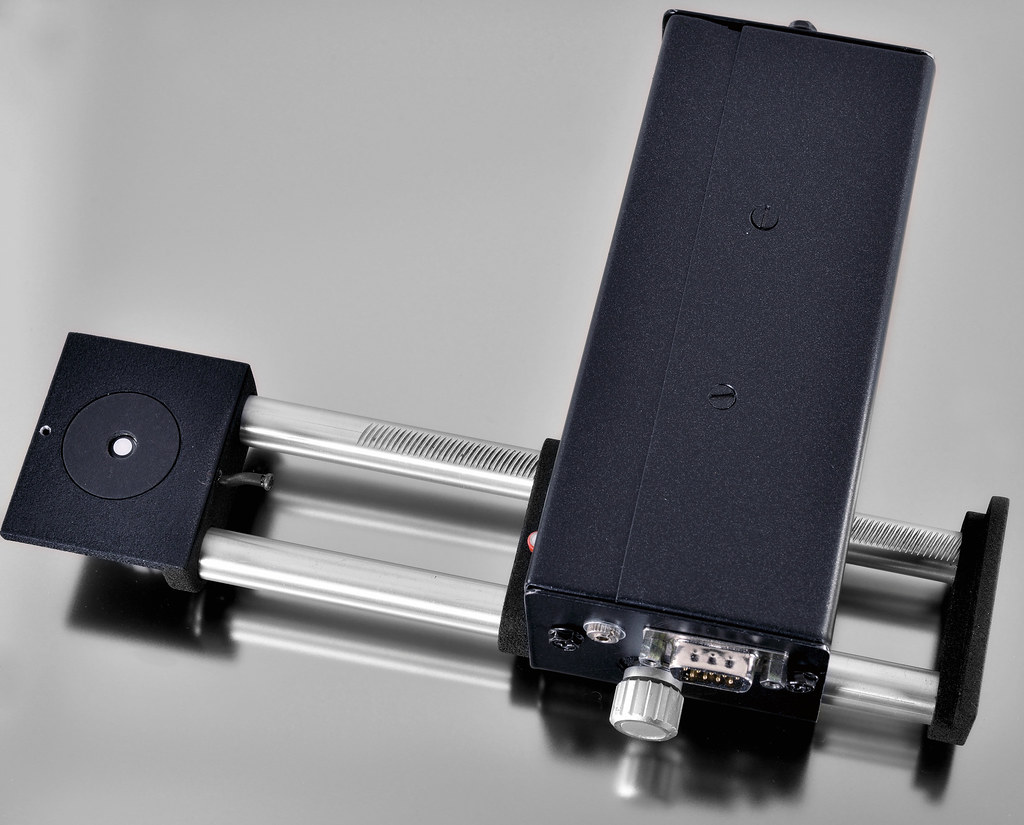
MacroRailProjRail09 by Erik Haak, on Flickr
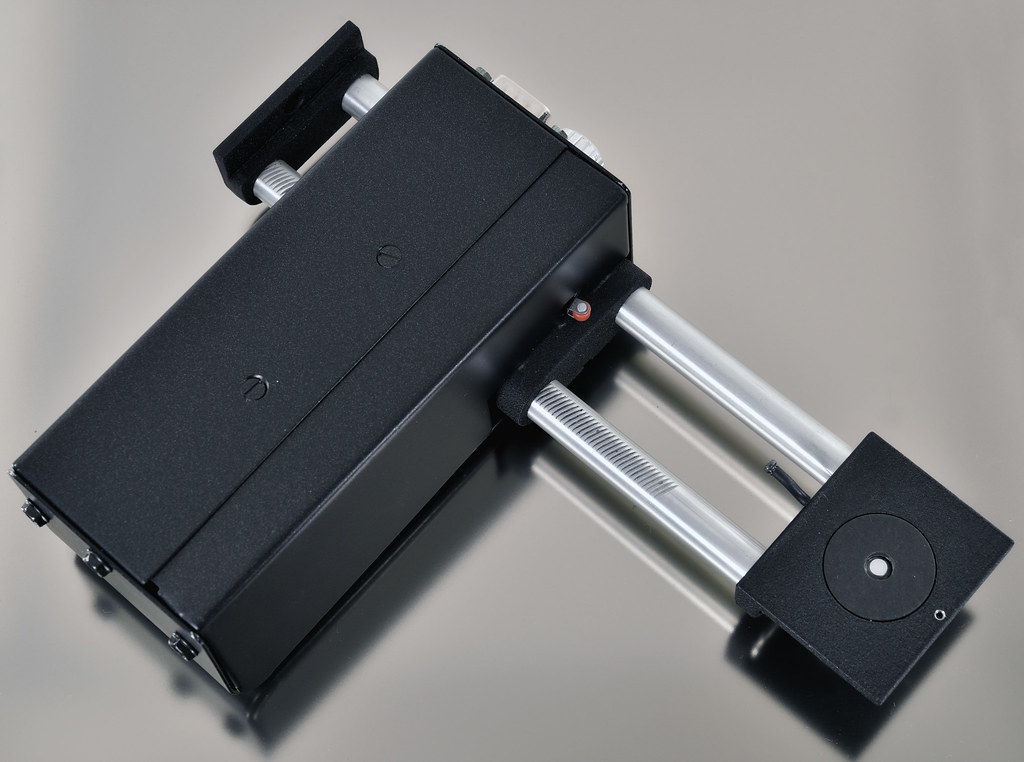
MacroRailProjRail08 by Erik Haak, on Flickr
Ook hier is het stuk aluminium wederom een gerecyled deel van een oude behuizing (vandaar de schroefverbinding in het midden). En met wat goedkope spuitbusverf van de Action ff matzwart gemaakt.
MacroRailProjRail07 by Erik Haak, on Flickr
MacroRailProjRail09 by Erik Haak, on Flickr
MacroRailProjRail08 by Erik Haak, on Flickr
Ook hier is het stuk aluminium wederom een gerecyled deel van een oude behuizing (vandaar de schroefverbinding in het midden). En met wat goedkope spuitbusverf van de Action ff matzwart gemaakt.
-
CaptainHook

Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
[update]
Nieuw 2,5mm stereo chassisdeel is binnen en heeft de plaats ingenomen van de mono-uitvoering.
Sluiter aansturing van Nikon DLSR, via de ronde 10-pins connector werkte niet goed.
Het bleek wel dat zowel [shutter] + [focus] pin geactiveerd moeten worden. Alleen de [shutter] pin doorverbinden naar [GND] bleek niet goed te gaan. Dus die zijn beiden doorverbonden en worden tegelijkertijd aangestuurd door het relais.
Geteld hoeveel omwentelingen (=5) de steppermotor moet maken voor een complete L/R run van de rail. En de totale werkbare lengte van de door mij gebruikte Vivitar focusrail (110mm) opgemeten.
Beide waarden verwerkt in de Arduino software.
Bovendien een extra delay toegevoegd in de camera shutter module.
Wanneer je namelijk een MUP (Mirror Up) delay hebt aanstaan (teneinde minimale trillingen te voorkomen) in je camera setup, dan moet de rail ff pauzeren, nadat de shutter getriggerd wordt (+ delay van de camera MUP) en de rail weer wat stapjes doet.
Inmiddels heeft de oorspronkelijke auteur zijn h/w + s/w setup weer eens veranderd. Ik weet nog niet of ik zelf ook die wijzigingen ga doorvoeren. Want dan moet m'n controller unit weer open en de soldeerbout weer opgestookt worden.
Nieuw 2,5mm stereo chassisdeel is binnen en heeft de plaats ingenomen van de mono-uitvoering.
Sluiter aansturing van Nikon DLSR, via de ronde 10-pins connector werkte niet goed.
Het bleek wel dat zowel [shutter] + [focus] pin geactiveerd moeten worden. Alleen de [shutter] pin doorverbinden naar [GND] bleek niet goed te gaan. Dus die zijn beiden doorverbonden en worden tegelijkertijd aangestuurd door het relais.
Geteld hoeveel omwentelingen (=5) de steppermotor moet maken voor een complete L/R run van de rail. En de totale werkbare lengte van de door mij gebruikte Vivitar focusrail (110mm) opgemeten.
Beide waarden verwerkt in de Arduino software.
Bovendien een extra delay toegevoegd in de camera shutter module.
Wanneer je namelijk een MUP (Mirror Up) delay hebt aanstaan (teneinde minimale trillingen te voorkomen) in je camera setup, dan moet de rail ff pauzeren, nadat de shutter getriggerd wordt (+ delay van de camera MUP) en de rail weer wat stapjes doet.
Inmiddels heeft de oorspronkelijke auteur zijn h/w + s/w setup weer eens veranderd. Ik weet nog niet of ik zelf ook die wijzigingen ga doorvoeren. Want dan moet m'n controller unit weer open en de soldeerbout weer opgestookt worden.
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Dat ziet er keurig afgewerkt uit. Mooi knutselproject!
Is die programmering niet van buitenaf aan te passen Erik? Zodat je een en ander niet direct weer open hoeft te schroeven? Of vereisen die updates hardwarematige aanpassingen?
Is die programmering niet van buitenaf aan te passen Erik? Zodat je een en ander niet direct weer open hoeft te schroeven? Of vereisen die updates hardwarematige aanpassingen?
"Te weten wat men weet, en te weten wat men niet weet, dát is kennis!" -Confucius-
Marco Weening Fotografie
Marco Weening Fotografie
-
MarcoEos70D


- Berichten: 2329
- Ervaringsniveau: ****
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
De nieuwe s/w vereist h/w matige aanpassingen. Er moeten wat pinnetjes tussen de Arduino - display - keyboard omgesoldeerd worden... 
Mijn eigen s/w aanpassingen zijn idd, zonder soldeerwerk, door te voeren. Kwestie van USB kabel erin, Arduino sketch laden, s/w aanpassen, verify, upload; klaar!
Mijn eigen s/w aanpassingen zijn idd, zonder soldeerwerk, door te voeren. Kwestie van USB kabel erin, Arduino sketch laden, s/w aanpassen, verify, upload; klaar!
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Toch maar de h/w wijzigingen doorgevoerd en de nieuwe s/w geladen. En toen... en toen deed 'ie het niet meer. Display dood.
Hmmm, blijkt een bekend probleem te zijn met de kloksnelheid van bepaalde Arduinos en Nokia displays die hardware SPI aangestuurd worden.
Moest wat s/w wijzigingen doorvoeren.
Hier kun je zien welke:
http://www.dpreview.com/forums/post/56908503
en toen deed 'ie 't weer.
Hmmm, blijkt een bekend probleem te zijn met de kloksnelheid van bepaalde Arduinos en Nokia displays die hardware SPI aangestuurd worden.
Moest wat s/w wijzigingen doorvoeren.
Hier kun je zien welke:
http://www.dpreview.com/forums/post/56908503
en toen deed 'ie 't weer.
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Is er iemand geïnteresseerd hoe dit project verder verloopt? Of volgen jullie het wel op dpreview?
Er zijn nog wat mechanische uitdagingen te overwinnen en de s/w krijgt weer de nodige uitbreidingen ivm Mirror Lockup. (mede op mijn verzoek)
Er zijn nog wat mechanische uitdagingen te overwinnen en de s/w krijgt weer de nodige uitbreidingen ivm Mirror Lockup. (mede op mijn verzoek)
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Ga vooral door Erik, vind het allemaal wel interessant 
-
Highlander


- Berichten: 6485
- Foto's bewerken toestaan: Ja
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Erik,
hartstikke interessant alhoewel ik het zelf niet zou kunnen (wat het waarschijnlijk dan weer zo interessant maakt)
hartstikke interessant alhoewel ik het zelf niet zou kunnen (wat het waarschijnlijk dan weer zo interessant maakt
Groetjes,
Jaap
Jaap
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Graag ook op dit forum blijven posten.
Erg leuk en wellicht ooit eens bruikbaar
Erg leuk en wellicht ooit eens bruikbaar
-
BlackBox
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
+1,
Vroeg me eigenlijk af of de rails makkelijk te verlengen is, of moet je dan ook softwarematig dingen aanpassen?
Dat je bij wijze van spreken meer dan 100 stappen hebt en je er max 99 kan invoeren ofzo.
Vroeg me eigenlijk af of de rails makkelijk te verlengen is, of moet je dan ook softwarematig dingen aanpassen?
Dat je bij wijze van spreken meer dan 100 stappen hebt en je er max 99 kan invoeren ofzo.

Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
De rail kun je zo lang maken als je wilt.
Aantal stappen is alleen beperkt door de s/w parameters. Je legt vast hoeveel millimeters (of tienden daarvan) je per stap doet, tussen twee punten op de rail. Dat kunnen er enkele tientallen zijn, maar ook honderden. In combinatie met het aantal frames per seconde wat je DSLR aan kan.
De s/w doet een calibratierun. Aan de hand van de ingevoerde specificaties van je constructie, zoals hoeveel rotaties van de stappenmotor voor een complete Links/Rechts travel van je rail en de totale lengte, 'weet' de s/w hoe lang je rail is.
Zo heb ik voor mijn constructie slechts het totaal aantal omwentelingen v.d. stappenmotor voor één complete L/R travel vastgelegd + de lengte die de rail dan aflegt.
En vervolgens zie je, dat na een calibratierun, de s/w keurig de juiste positie in mm, op het display toont.
ALLEEN (!) je hebt dan een ander probleem (waar ik nu zelf tegenaan loop). Als je een rail neemt waarbij de camera beweegt, m.a.w. steeds verder uitsteekt, dan gaat de hefboomwerking (de massa van je DSLR + gebruikt objectief) een steeds groter probleem worden. M.a.w. de DSLR trekt/duwt nogal aan de rail en wringt 'm behoorlijk. Dan krijg je of te veel wrijving; tandjes overslaan, of de motor hapert (afhankelijk van het beschikbare koppel).
Daar kun je op verschillende manier wat aan doen:
-koppel verder verhogen (microstepping aanpassen bij de Easydriver en/of stroomsterkte verhogen). Uitvogelen wat de grenzen van je mechanika zijn. (met navenante aanpassingen in de s/w)
-zorgen dat de mechanische hefbomen enigszins gecompenseerd worden, door b.v. een soort van contragewicht te gebruiken, zodat de hefboomwerking zo goed mogelijk tegengegaan wordt.
-combinatie van bovenstaande zaken.
OF een compleet andere constructie bouwen met 3-assige geleiding en b.v. een slede die met stappenmotor en al beweegt.
Maar dan gaat het, het hele doel van dit project voorbij. Het was immers de bedoeling met zo laag mogelijke kosten en beschikbare spullen dit voor elkaar te krijgen.
Het was immers de bedoeling met zo laag mogelijke kosten en beschikbare spullen dit voor elkaar te krijgen.
Als je er nog tig euro aan nieuwe 3D/CNC hardware tegenaan gooit, dan lukt het altijd wel.
Zo zou je een veel krachtigere stappenmotor kunnen nemen, maar die is ook weer groter, vereist een zwaardere voeding en een zwaarder uitgevoerde stuurelektronika, etc.
Heb inmiddels al de microstepping gehalveerd (van 8 --> 4), dat levert idd iets meer koppel op. Maar nog niet genoeg.
Ga nu kijken of ik iets (mechanisch) kan bedenken om de onbalans in de rail te compenseren.
Je leert hier wel heel veel van.  Op zowel mechanisch, elektronisch en softwarematig gebied. Vooral het samenspel tussen dit alles, in combinatie met het fotografiedoel (focus stacking made easy) is gewoon erg leuk en interessant!
Op zowel mechanisch, elektronisch en softwarematig gebied. Vooral het samenspel tussen dit alles, in combinatie met het fotografiedoel (focus stacking made easy) is gewoon erg leuk en interessant!
Aantal stappen is alleen beperkt door de s/w parameters. Je legt vast hoeveel millimeters (of tienden daarvan) je per stap doet, tussen twee punten op de rail. Dat kunnen er enkele tientallen zijn, maar ook honderden. In combinatie met het aantal frames per seconde wat je DSLR aan kan.
De s/w doet een calibratierun. Aan de hand van de ingevoerde specificaties van je constructie, zoals hoeveel rotaties van de stappenmotor voor een complete Links/Rechts travel van je rail en de totale lengte, 'weet' de s/w hoe lang je rail is.
Zo heb ik voor mijn constructie slechts het totaal aantal omwentelingen v.d. stappenmotor voor één complete L/R travel vastgelegd + de lengte die de rail dan aflegt.
En vervolgens zie je, dat na een calibratierun, de s/w keurig de juiste positie in mm, op het display toont.
ALLEEN (!) je hebt dan een ander probleem (waar ik nu zelf tegenaan loop). Als je een rail neemt waarbij de camera beweegt, m.a.w. steeds verder uitsteekt, dan gaat de hefboomwerking (de massa van je DSLR + gebruikt objectief) een steeds groter probleem worden. M.a.w. de DSLR trekt/duwt nogal aan de rail en wringt 'm behoorlijk. Dan krijg je of te veel wrijving; tandjes overslaan, of de motor hapert (afhankelijk van het beschikbare koppel).
Daar kun je op verschillende manier wat aan doen:
-koppel verder verhogen (microstepping aanpassen bij de Easydriver en/of stroomsterkte verhogen). Uitvogelen wat de grenzen van je mechanika zijn. (met navenante aanpassingen in de s/w)
-zorgen dat de mechanische hefbomen enigszins gecompenseerd worden, door b.v. een soort van contragewicht te gebruiken, zodat de hefboomwerking zo goed mogelijk tegengegaan wordt.
-combinatie van bovenstaande zaken.
OF een compleet andere constructie bouwen met 3-assige geleiding en b.v. een slede die met stappenmotor en al beweegt.
Maar dan gaat het, het hele doel van dit project voorbij.
Als je er nog tig euro aan nieuwe 3D/CNC hardware tegenaan gooit, dan lukt het altijd wel.
Zo zou je een veel krachtigere stappenmotor kunnen nemen, maar die is ook weer groter, vereist een zwaardere voeding en een zwaarder uitgevoerde stuurelektronika, etc.
Heb inmiddels al de microstepping gehalveerd (van 8 --> 4), dat levert idd iets meer koppel op. Maar nog niet genoeg.
Ga nu kijken of ik iets (mechanisch) kan bedenken om de onbalans in de rail te compenseren.
-
CaptainHook
Onderwerp:
Re: Arduino gestuurde stappenmotor/macrorail
Leuk en leerzaam!
Houd je ook bijvoorbeeld tijd je kwijt bent erik?
Houd je ook bijvoorbeeld tijd je kwijt bent erik?
"Te weten wat men weet, en te weten wat men niet weet, dát is kennis!" -Confucius-
Marco Weening Fotografie
Marco Weening Fotografie
-
MarcoEos70D
- Berichten: 2329
- Ervaringsniveau: ****
Terug naar “Computer hardware en software algemeen”
Wie is er online
Gebruikers op dit forum: Geen geregistreerde gebruikers en 30 gasten