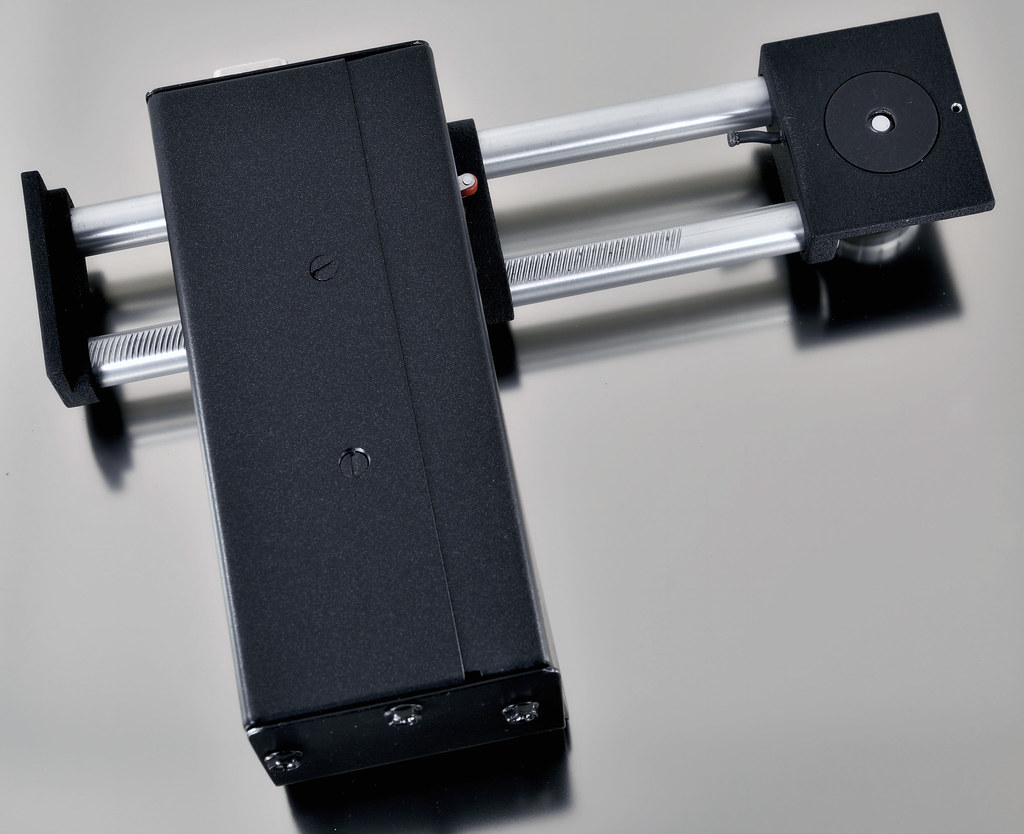
De rail kun je zo lang maken als je wilt.
Aantal stappen is alleen beperkt door de s/w parameters. Je legt vast hoeveel millimeters (of tienden daarvan) je per stap doet, tussen twee punten op de rail. Dat kunnen er enkele tientallen zijn, maar ook honderden. In combinatie met het aantal frames per seconde wat je DSLR aan kan.
De s/w doet een calibratierun. Aan de hand van de ingevoerde specificaties van je constructie, zoals hoeveel rotaties van de stappenmotor voor een complete Links/Rechts travel van je rail en de totale lengte, 'weet' de s/w hoe lang je rail is.
Zo heb ik voor mijn constructie slechts het totaal aantal omwentelingen v.d. stappenmotor voor één complete L/R travel vastgelegd + de lengte die de rail dan aflegt.
En vervolgens zie je, dat na een calibratierun, de s/w keurig de juiste positie in mm, op het display toont.
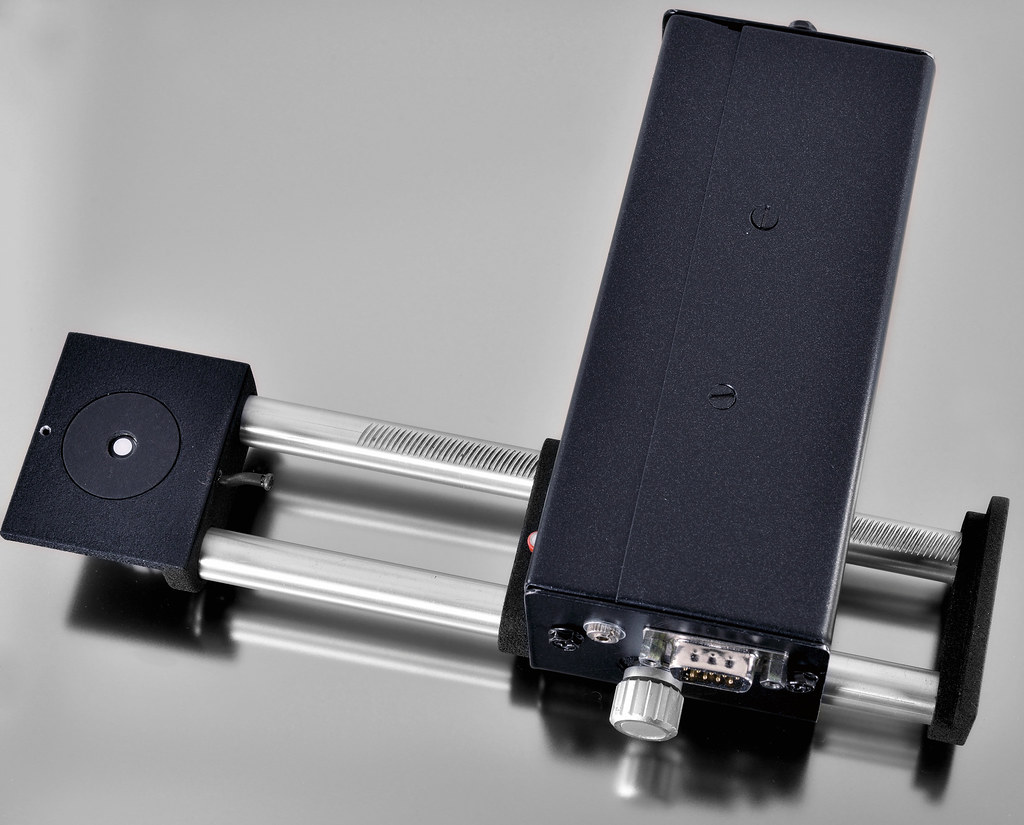
ALLEEN (!) je hebt dan een ander probleem (waar ik nu zelf tegenaan loop). Als je een rail neemt waarbij de camera beweegt, m.a.w. steeds verder uitsteekt, dan gaat de hefboomwerking (de massa van je DSLR + gebruikt objectief) een steeds groter probleem worden. M.a.w. de DSLR trekt/duwt nogal aan de rail en wringt 'm behoorlijk. Dan krijg je of te veel wrijving; tandjes overslaan, of de motor hapert (afhankelijk van het beschikbare koppel).
Daar kun je op verschillende manier wat aan doen:
-koppel verder verhogen (microstepping aanpassen bij de Easydriver en/of stroomsterkte verhogen). Uitvogelen wat de grenzen van je mechanika zijn. (met navenante aanpassingen in de s/w)
-zorgen dat de mechanische hefbomen enigszins gecompenseerd worden, door b.v. een soort van contragewicht te gebruiken, zodat de hefboomwerking zo goed mogelijk tegengegaan wordt.
-combinatie van bovenstaande zaken.
OF een compleet andere constructie bouwen met 3-assige geleiding en b.v. een slede die met stappenmotor en al beweegt.
Maar dan gaat het, het hele doel van dit project voorbij.

Het was immers de bedoeling met zo laag mogelijke kosten en beschikbare spullen dit voor elkaar te krijgen.
Als je er nog tig euro aan nieuwe 3D/CNC hardware tegenaan gooit, dan lukt het altijd wel.

Zo zou je een veel krachtigere stappenmotor kunnen nemen, maar die is ook weer groter, vereist een zwaardere voeding en een zwaarder uitgevoerde stuurelektronika, etc.
Heb inmiddels al de microstepping gehalveerd (van 8 --> 4), dat levert idd iets meer koppel op. Maar nog niet genoeg.
Ga nu kijken of ik iets (mechanisch) kan bedenken om de onbalans in de rail te compenseren.

Je leert hier wel heel veel van.

Op zowel mechanisch, elektronisch en softwarematig gebied. Vooral het samenspel tussen dit alles, in combinatie met het fotografiedoel (
focus stacking made easy) is gewoon erg leuk en interessant!